
به گزارش خبرگزاری مهر به نقل از دیجیتال ترندز، تحقیقات جدید انستیتو فناوری ماساچوست (MIT) به ربات ها کمک می کند بهتر اشیا را کنترل کنند.
۲ گروه از محققان آزمایشگاه CASIL تحقیقاتی را برای ارتقای قابلیت کنترل اشیا در ربات های نرم منتشر کرده اند. در این تحقیق ها برخلاف روش های معمول از مواد انعطاف پذیر در ربات ها استفاده شده است.
این فناوری ها به ساخت دست های رباتیکی کمک می کند که نه تنها می تواند اشیای مختلف را کنترل کند، بلکه شی را حس کرده و حتی می تواند آن را بپیچاند یا خم کند.
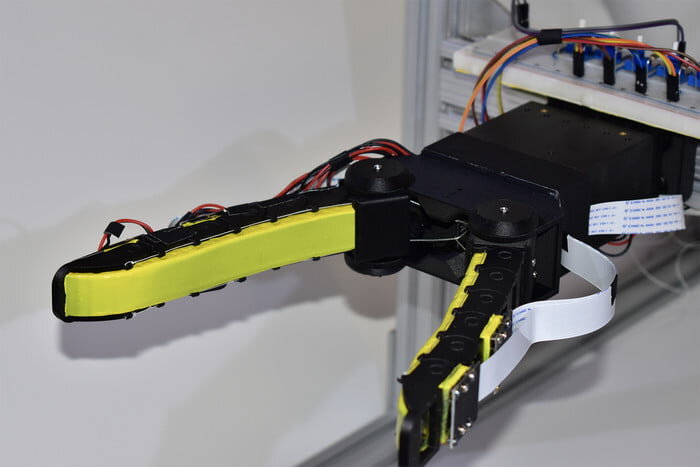
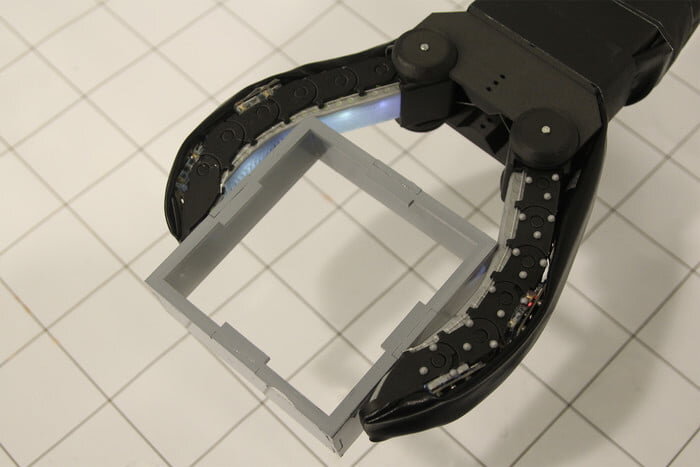
یکی از گروه های تحقیقاتی از روشی به نام GelFlex استفاده کرد. در این روش دوربین هایی در نوک انگشتان دو بازوی رباتیک نصب شد و تا آنها بتوانند اشیا مختلف مانند جعبه سی دی را بهتر کنترل کنند. محققان متوجه شدند GelFlex می تواند با دقت ۹۶ درصد اشیای کنترل شده را شناسایی کند.
این محققان با استفاده از سیلیکون شفاف، دوربین هایی با لنز فیش آی (fish eye) را روی انگشتان رباتیک نصب کردند. در مرحله بعد با یک جوهر منعکس کننده، انگشت رنگ آمیزی و چراغ های «ال ای دی» به آن افزوده شد. به این ترتیب دوربین های نصب شده در انگشتان ربات می دیدند سیلیکون موجود در انگشتان مخالف نسبت به شی چه واکنشی نشان می دهد.
در مرحله بعد با کمک اطلاعاتی درباره خم کردن انگشتان به یک سیستم هوش مصنوعی آموزش داده شد تا اندازه و شکل شی را تخمین بزند.
«یو شی» محقق ارشد این پژوهش می گوید: انگشت نرم ربات ما می تواند با دقت بالا شیوه کنترل اشیا را پیش بینی کند. این ربات برخلاف نمونه های موجود می تواند به راحتی فعالیت های مختلفی انجام دهد.
از سوی دیگر گروه تحقیقاتی دوم سیستمی از حسگرها توسعه دادند که می تواند با لمس اشیا آنها را شناسایی کند. دقت این سیستم ۹۰ درصد است.
در این پروژه به یک گیره مخروطی شکل( که قبلا ساخته شده بود) حسگرهای لمسی افزوده شد. حسگرهای مذکور در حقیقت حباب های مینیاتوری از جنس لاتکس هستند که به یک حسگر متصل شده اند. اطلاعات تغییرات در فشار حباب ها به الگوریتم های هوش مصنوعی ارسال و چگونگی کنترل شی مشخص می شود.
افزودن حسگر به دست رباتیکی که نرم و قدرتمند است به یک گیره کمک می کند تا اشیا کوچک و ظریف را کنترل کند.





















نظر شما